產(chǎn)品特性
開放性 模塊化 可重構(gòu) 易擴(kuò)展
該系列機(jī)器人在提供系統(tǒng)解決方案的同時,可根據(jù)用戶的需求選擇具有不同自由度的機(jī)械臂,也可基于此款機(jī)器人開發(fā)各種機(jī)器人系統(tǒng),并以此為平臺開展多學(xué)科創(chuàng)新研究,從而滿足教學(xué)和研究的需要。目前已經(jīng)有清華大學(xué)、浙江大學(xué)、山東大學(xué)、西北工業(yè)大學(xué)、第二炮兵工程、浙大臺州研究院等多家知名大學(xué)和研究機(jī)構(gòu)客戶在使用該系列機(jī)器人
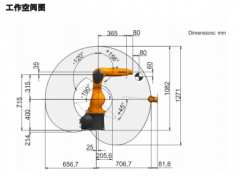
三自由度機(jī)械臂 ~ 七自由度機(jī)械臂
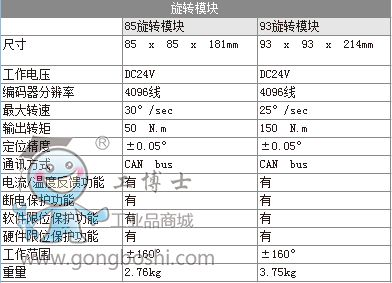
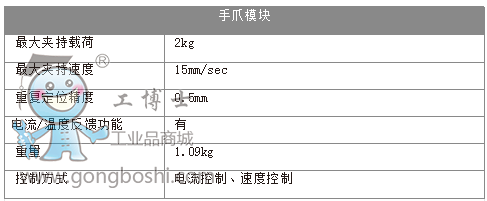
額定負(fù)載:夾持1—2Kg;末端1—10Kg
重復(fù)定位精度:±0.5m
本體重量(不含線纜):9.34—23.68Kg
供電方式:24V直流供電
支持安裝方式:臺面安裝、吊頂安裝
單模塊工作環(huán)境:溫度0-55℃;濕度20-93%
控制單元數(shù)量:4—8個DSP(3個自由度+1個手爪)
用戶可開展的研究方向
移動機(jī)械臂研究 基于視覺反饋的手臂控制 雙/多臂協(xié)調(diào)控制
手眼協(xié)調(diào) 冗余自由度機(jī)器人研究 模塊化機(jī)器人智能控制
基于CAN總結(jié)的分布式運動控制 空間操作臂研究
串聯(lián)機(jī)器人位置/速度/力控制 機(jī)器人運動學(xué)、動力學(xué)研究
機(jī)器人軌跡規(guī)劃、*優(yōu)化控制研究
工業(yè)機(jī)器人相關(guān)配件
功能強(qiáng)大、豐富的核心模塊 工業(yè)級性能和可靠性 支持用戶開發(fā)機(jī)器人系統(tǒng)
了解更多請前往:http://robot4s.gongboshi.com/



絡(luò)警察")


絡(luò)110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信







證")