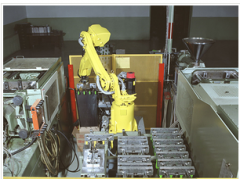
工博士機器人標準焊接工作站
本體: KR6 R1820 軸數(shù):6
電源:麥格米特CM350 負載:6公斤
焊槍: TBi 外置 臂展:1823mm
配件:板/管/盤軸 精度:0.04mm
選配:清槍站/變位機/導軌
工業(yè)機器人焊接工作站的工作原理:
工業(yè)機器人焊接工作站正常運行的中樞是其控制柜中的計算機系統(tǒng)。焊接機器人
工作站通過計算機系統(tǒng)對焊接環(huán)境、焊縫跟蹤及焊接動態(tài)過程進行智能傳感,根
據(jù)傳感信息對各種復雜的空間曲線焊縫進行實時跟蹤控制,從而控制焊槍能夠?qū)?br />
現(xiàn)規(guī)劃軌跡運行,并對焊接動態(tài)過程進行實時智能控制。
其中焊接機器人采用六軸關節(jié)型設計,具備六個關節(jié)自由度,在工作中主要依靠
智能控制系統(tǒng)實現(xiàn)統(tǒng)一規(guī)劃,點焊機器人通常采用示教再現(xiàn)的工作原理,操作人
員通過引導點焊機械臂,一步步按實際任務操作一遍,機器人在導引過程中自動
記憶示教的每個動作的位置、姿態(tài)、運動參數(shù)、焊接參數(shù)等,并自動生成一個連
續(xù)執(zhí)行全部操作的程序。
成功案例:



工業(yè)機器人焊接工作站的特點:
1、工業(yè)機器人焊接工作站的特點在于人工裝卸工件的時間小于機器人焊接
的工作時間,可以充分地利用機器人,生產(chǎn)效率高;
2、工業(yè)機器人焊接工作站選用帶有安全防碰撞裝瓷的標準機器人用焊槍,
且操作者遠離機器人工作空間,安全性好。
3、采用轉臺交換工件,整個焊接機器人工作站占用面積相對較小,整體布
局也利于工件的物流作業(yè)。
4、由于安裝了不同的末端執(zhí)行器可以完成不同的作業(yè),用于不同的生產(chǎn)作
業(yè)多數(shù)情況需專門設計,它與機器人的機型、整體布局、工作順序都有著
直接關系。


絡警察")


絡110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信








 [VIP第2年] 指數(shù):1
[VIP第2年] 指數(shù):1 通過認證
通過認證