
 �ھ��ͷ�
�ھ��ͷ�
 ��I(y��)��
��I(y��)��


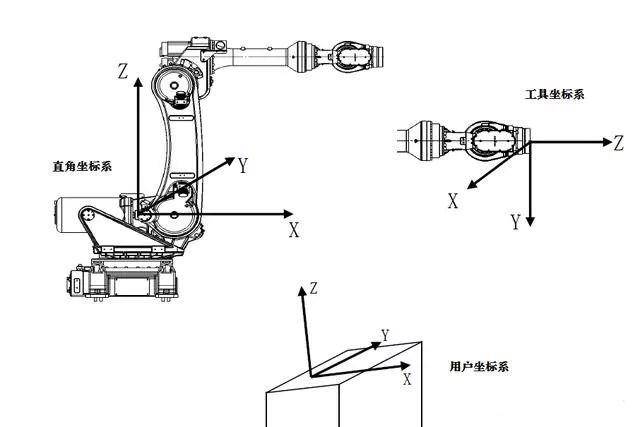
�P(gu��n)�I�~�����I(y��)�C(j��)��������(bi��o)ϵ�����I(y��)�C(j��)�����S������(bi��o)ϵ
����(bi��o)ϵ�������Ƴ����o����������Ҋ��ֱ������(bi��o)ϵ��ƽ��ֱ������(bi��o)ϵ�������f���|(zh��)�c(di��n)��λ�á��\(y��n)�ӵĿ���������ȣ�����xȡ������(bi��o)ϵ���څ���ϵ�У���_�����gһ�c(di��n)��λ�ã���Ҏ(gu��)�������xȡ���д����һ�M��(sh��)��(j��)���@�ͽ���“����(bi��o)”����ijһ���}��Ҏ(gu��)������(bi��o)�ķ���������ԓ���}���õ�����(bi��o)ϵ��
����(bi��o)ϵ�Ǟ�_���C(j��)���˵�λ�ú��ˑB(t��i)���ڙC(j��)���˻���g���M(j��n)�ж��x��λ��ָ��(bi��o)ϵ�y(t��ng)������(bi��o)ϵ�֞��P(gu��n)��(ji��)����(bi��o)ϵ��ֱ������(bi��o)ϵ��

�C(j��)��������(bi��o)ϵ�_��
�C(j��)���˳����������c(di��n)��λ�ö�������(bi��o)ϵ�P(gu��n)(li��n)��ͬ�r�@������(bi��o)ϵҲ���ܺ���һ������(bi��o)ϵ�P(gu��n)(li��n)��
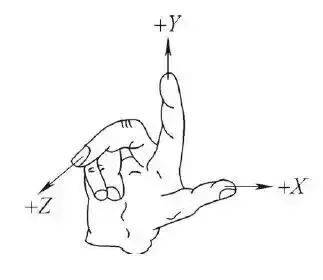
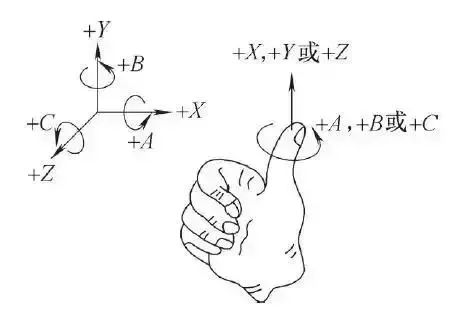
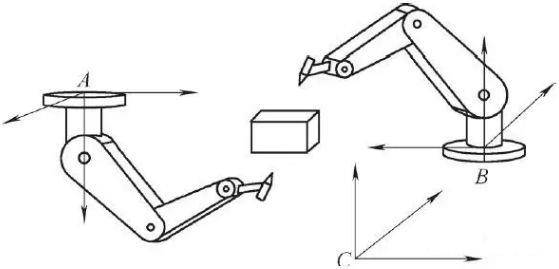
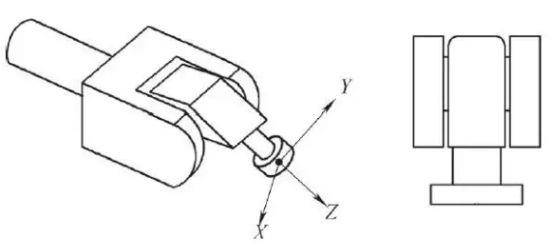
�C(j��)���˵ĸ��N����(bi��o)ϵ�������������ֶ��t��Q������D3��ʾ����(d��ng)���@ƽ����X ��Y ��Z �S���ĸ��S���D(zhu��n)�r���քe���x��A ��B ��C ��A ��B ��C ��������քe��X ��Y ��Z ����������������ǰ�M(j��n)�ķ���Ҋ�D4����
��������(bi��o)ϵ
���D(zhu��n)����(bi��o)ϵ
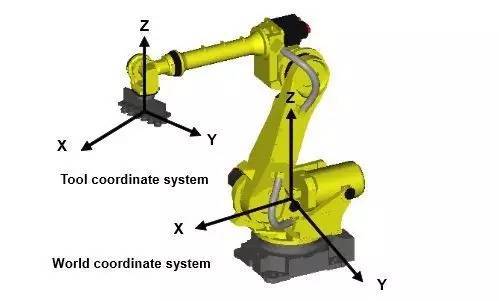
���õ�����(bi��o)ϵ�ǽ^������(bi��o)ϵ���C(j��)������(bi��o)ϵ���C(j��)е�ӿ�����(bi��o)ϵ��������(bi��o)ϵ��
һ�����I(y��)�C(j��)�����P(gu��n)��(ji��)����(bi��o)ϵ
�P(gu��n)��(ji��)����(bi��o)ϵ���O(sh��)���ڙC(j��)�����P(gu��n)��(ji��)�е�����(bi��o)ϵ���P(gu��n)��(ji��)����(bi��o)ϵ�ЙC(j��)���˵�λ�ú��ˑB(t��i)���Ը��P(gu��n)��(ji��)������(c��)���P(gu��n)��(ji��)����(bi��o)ϵ�����(zh��n)���_����
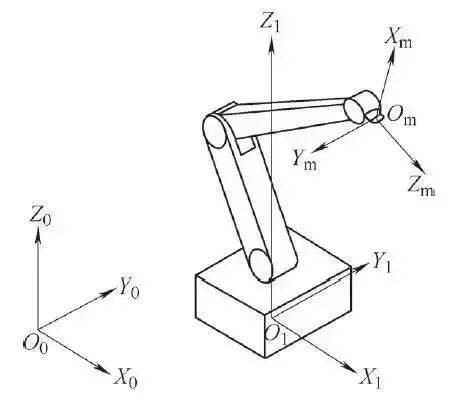
J1:0° J2:0° J3:0° J4:0° J5:0° J6:0°
�D1�е��P(gu��n)��(ji��)����(bi��o)ϵ���P(gu��n)��(ji��)ֵ�飺
����(bi��o)ϵʾ��
��������(bi��o)ϵ
�������I(y��)�C(j��)����ֱ������(bi��o)ϵ
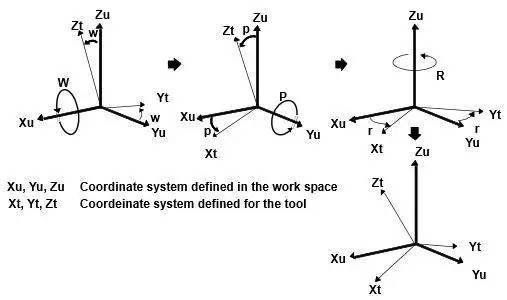
ֱ������(bi��o)ϵ�еęC(j��)���˵�λ�ú��ˑB(t��i)��ͨ�^�Ŀ��g�ϵ�ֱ������(bi��o)ϵԭ�c(di��n)�����߂�(c��)��ֱ������(bi��o)ϵԭ�c(di��n)�����������c(di��n)��������(bi��o)ֵx��y��z�Ϳ��g�ϵ�ֱ������(bi��o)ϵ������X�S��Y�S��Z�S�܇��Ĺ��߂�(c��)��ֱ������(bi��o)ϵ�Ļ��D(zhu��n)��w��p��r���Զ��x���D2�飨w��p��r���ĺ��x��
�������I(y��)�C(j��)������������(bi��o)ϵ
��������(bi��o)ϵ�DZ��̶��ڿ��g�ϵĘ�(bi��o)��(zh��n)ֱ������(bi��o)ϵ���䱻�̶����əC(j��)�������ȴ_����λ�á��Ñ�����(bi��o)ϵ�ǻ���ԓ����(bi��o)ϵ���O(sh��)���ġ�������λ�Ô�(sh��)��(j��)��ʾ�̺͈�(zh��)�С����P(gu��n)���C(j��)���ˣ�Rϵ��/Mϵ��/ARC Mate/LR Mate������������(bi��o)ϵԭ�c(di��n)λ�õĴ���(bi��o)��(zh��n)�飺
�� �?sh��)����b�C(j��)���ˡ�M-710iC���⣺��J1�S��ˮƽ�Ƅ�J2�S�������λ�á�
�� �?sh��)����b�C(j��)���ˡ�M-710iC��J1�S̎��0λ�r���x�_J4�S�����J1�S�ϵ��c(di��n)��
 ��������(bi��o)ϵ
��������(bi��o)ϵ
�ġ����I(y��)�C(j��)���˹�������(bi��o)ϵ
�@���Á����x���������c(di��n)��TCP����λ�ú����ˑB(t��i)������(bi��o)ϵ����������(bi��o)ϵ��������M(j��n)���O(sh��)�����ڛ]�ж��x�ĕr����Ĭ�J(r��n)��������(bi��o)ϵ�����ԓ����(bi��o)ϵ��
�塢���I(y��)�C(j��)�����Ñ�����(bi��o)ϵ
�@���Ñ�ÿ�����I(y��)���g�M(j��n)�ж��x��ֱ������(bi��o)ϵ��������λ�üĴ�����ʾ�̺͈�(zh��)�С�λ���a(b��)��ָ��Ĉ�(zh��)�еȡ��ڛ]�ж��x�ĕr������������(bi��o)ϵ�����ԓ����(bi��o)ϵ��
����ʲô�ǹ��I(y��)�C(j��)��������(bi��o)ϵ��
����(bi��o)ϵ����_���C(j��)���˵�λ�ú��ˑB(t��i)���ڙC(j��)���˻���g���M(j��n)�е�λ��ָ��(bi��o)ϵ�y(t��ng)��
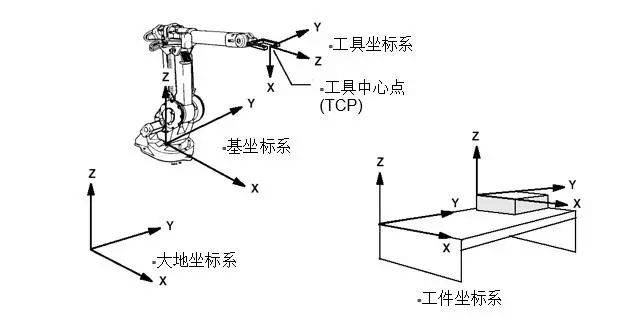
����(bi��o)ϵ������������(bi��o)ϵ��Base Coordinate System�����������(bi��o)ϵ��World Coordinate System������������(bi��o)ϵ��Tool Coordinate System������������(bi��o)ϵ��Work Object Coordinate System����
�ߡ����I(y��)�C(j��)���˹�������(bi��o)ϵ
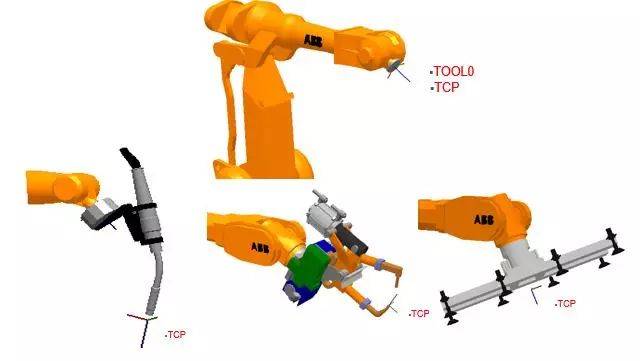
�C(j��)���˹�������(bi��o)ϵ���ɹ��������c(di��n) TCP �c����(bi��o)��λ�M�ɡ�
�C(j��)����(li��n)���\(y��n)�Еr��TCP �DZ���ġ�
1�� Reorient �ض�λ�\(y��n)�ӣ��ˑB(t��i)�\(y��n)�ӣ��C(j��)���� TCP λ�ò�׃���C(j��)���˹���������(bi��o)�S�D(zhu��n)�ӣ���׃�ˑB(t��i)��
2��Linear �����\(y��n)�әC(j��)���˹����ˑB(t��i)��׃���C(j��)���� TCP ������(bi��o)�S�����Ƅӡ�
�C(j��)���˳���֧�ֶ��� TCP�����Ը���(j��)��(d��ng)ǰ������B(t��i)�M(j��n)��׃�Q��
�C(j��)���˹��߱����Q�����¶��x TCP ���Բ����ij���ֱ���\(y��n)�С�
3�����x��������(bi��o)ϵ�ķ�����
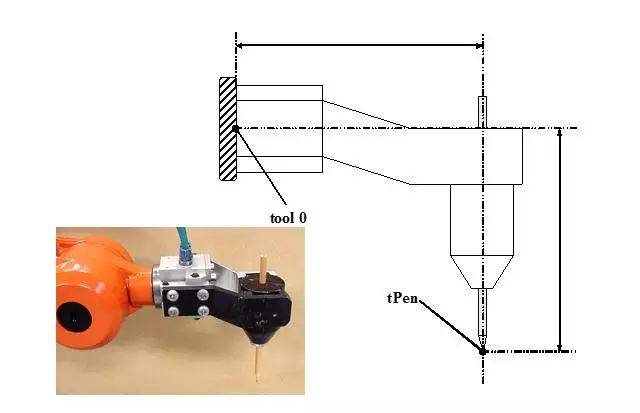
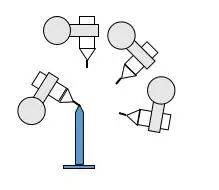
��N��N����4���c(di��n)����TCP�����C(j��)���� TCP ͨ�^N�N��ͬ�ˑB(t��i)ͬij���c(di��n)�������ó���M�⣬ͨ�^Ӌ(j��)��ó���(d��ng)ǰ TCP �c�C(j��)�������������c(di��n) �� tool0 �� ����(y��ng)λ�ã�����(bi��o)ϵ�����c tool0 һ�¡�
��TCP��Z������N�c(di��n)�����A(ch��)�ϣ�Z�c(di��n)�c���c(di��n)�B��������(bi��o)ϵ Z ����
��TCP��X��Z������N�c(di��n)�����A(ch��)�ϣ�X�c(di��n)�c���c(di��n)�B��������(bi��o)ϵ X ����Z�c(di��n)�c���c(di��n)�B��������(bi��o)ϵ Z ����
�ˡ����I(y��)�C(j��)���˹�������(bi��o)ϵ
�C(j��)���˹�������(bi��o)ϵ���ɹ���ԭ�c(di��n)�c����(bi��o)��λ�M�ɡ�
�C(j��)���˳���֧�ֶ��� Wobj�����Ը���(j��)��(d��ng)ǰ������B(t��i)�M(j��n)��׃�Q��
�ⲿ�A�߱����Q�����¶��x Wobj ���Բ����ij���ֱ���\(y��n)�С�
ͨ�^���¶��x Wobj�����Ժ�������һ�������m�϶��_�C(j��)���ˡ�
1�����x��������(bi��o)ϵ�ķ�����
���c(di��n)�����c(di��n) X1 �c �c(di��n) X2 �B���M�� X �S��ͨ�^�c(di��n) Y1 �� X �S���Ĵ�ֱ������ Y �S��
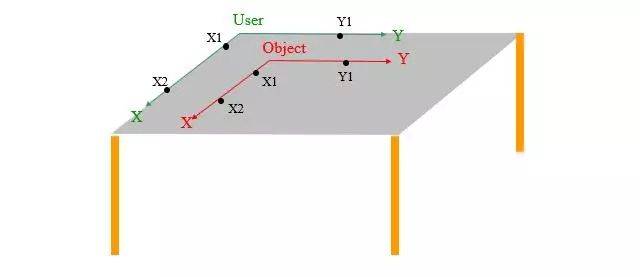
2�����I(y��)�C(j��)���˹�������(bi��o)ϵ��Obje c tCoordinate System���c�������P(gu��n)��ͨ�����m�ڌ��C(j��)�����M(j��n)�о��D2 ��������(bi��o)ϵ�̡���������(bi��o)ϵ����(y��ng)�����������x���������ڴ������(bi��o)ϵ������������(bi��o)ϵ����λ�á�
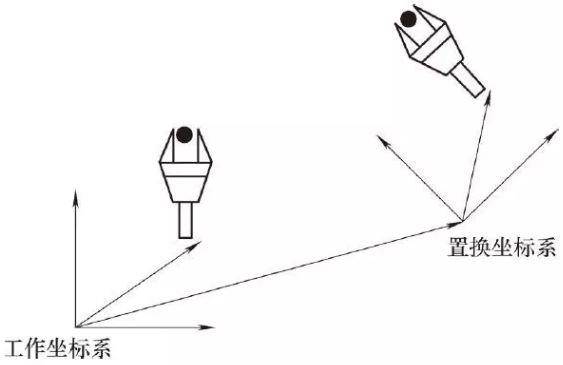
3�����I(y��)�C(j��)�����ÓQ����(bi��o)ϵ��Displacement CoordinateSystem���ַQ��λ������(bi��o)ϵ���Еr��Ҫ��ͬһ������ͬһ��܉�E�ڲ�ͬ��λ�ϼӹ������˱���ÿ�����¾��̣����Զ��xһ���ÓQ����(bi��o)ϵ���ÓQ����(bi��o)ϵ���ڹ�������(bi��o)ϵ���x����D3��ʾ����(d��ng)�ÓQ����(bi��o)ϵ����������е������c(di��n)�������ÓQ��
4�����I(y��)�C(j��)����������(bi��o)ϵ��WristCoordinate System����������(bi��o)ϵ�����Á����x���߷���ġ��ں��Α�(y��ng)���У�������(bi��o)ϵ���Զ��x�鹤������(bi��o)ϵ�������غϡ�������(bi��o)ϵ��Z �S�͙C(j��)���˵ĵ�6���S�غϣ���D4��ʾ������(bi��o)ϵԭ�c(di��n)λ��ĩ�˷��m�P���ģ�X �S�����c�D3 �ÓQ����(bi��o)ϵ�D4 ������(bi��o)ϵ���m�P�Ϙ�(bi��o)�R�ķ�����ͬ���෴��Z �S��ֱ���⣬Y �S�������ַ��t��
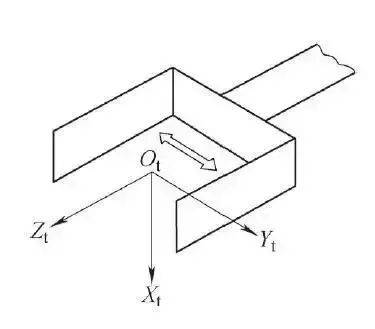
5�����I(y��)�C(j��)���˹�������(bi��o)ϵ��ToolCoordinate System�����b��ĩ�˷��m�P�ϵĹ�����Ҫ���������c(di��n)��TCP�����xһ����������(bi��o)ϵ��ͨ�^����(bi��o)ϵ���D(zhu��n)�Q�����Բ����C(j��)�����ڹ�������(bi��o)ϵ���\(y��n)�ӣ��Է���������������ĥ�p����Q��ֻ�����¶��x��������(bi��o)ϵ�������ø��ij���������(bi��o)ϵ������������(bi��o)ϵ�£�������֮�g������λ�ú��ˑB(t��i)�Ǵ_���ġ�
 ������(bi��o)ϵ
������(bi��o)ϵ
6�����I(y��)�C(j��)�����P(gu��n)��(ji��)����(bi��o)ϵ��Join tCoordinate System���Á������C(j��)����ÿ����(d��)���P(gu��n)��(ji��)���\(y��n)�ӣ��P(gu��n)��(ji��)��Ϳ��ܲ�ͬ�� ���Ƅ��P(gu��n)��(ji��)���D(zhu��n)���P(gu��n)��(ji��)�ȣ����C(j��)����ĩ���Ƅӵ�����λ�ã����P(gu��n)��(ji��)����(bi��o)ϵ�²��������������(q��)�Ӹ��P(gu��n)��(ji��)�\(y��n)�ӣ��Ķ�����(d��o)�C(j��)����ĩ�˵��_(d��)ָ����λ�á�
�š����I(y��)�C(j��)�����S������(bi��o)ϵ����
���I(y��)�C(j��)���������a(ch��n)�У�һ����Ҫ�����������������c(di��n)������O(sh��)�䣬���D(zhu��n)�ӹ����Ļ��D(zhu��n)�_���Ƅӹ������Ƅ��_�ȡ��@Щ����O(sh��)����\(y��n)�Ӻ�λ�ÿ��ƶ���Ҫ�c���I(y��)�C(j��)��������ϲ�Ҫ������(y��ng)���ȡ�ͨ���C(j��)�����\(y��n)���S���书�ܿɄ��֞�C(j��)�����S�������S���b�S�������S���b�S�y(t��ng)�Q�ⲿ�S��
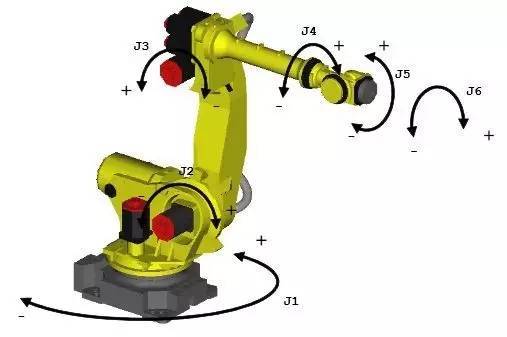
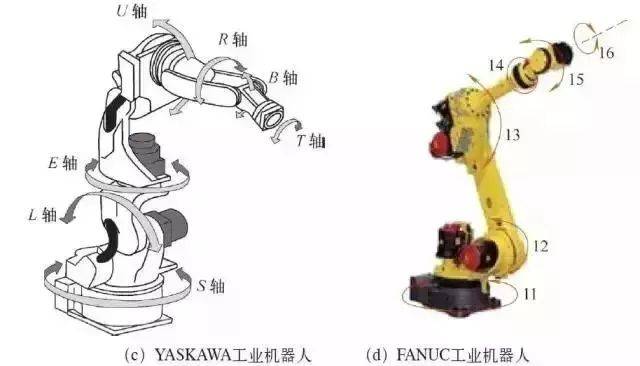
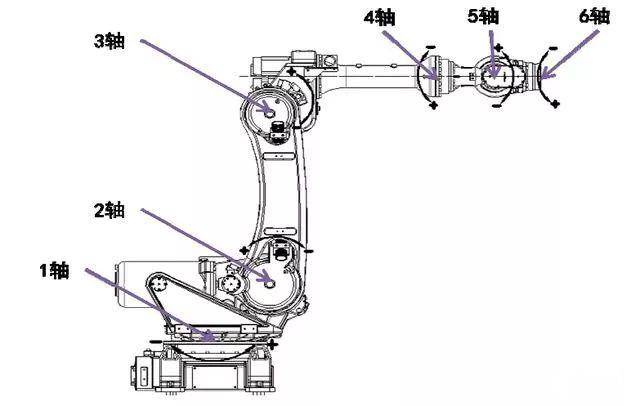
�C(j��)�����S��ָ�������w���S�����ڙC(j��)���˱�����Ŀǰ���õĹ��I(y��)�C(j��)���˴����8�S�����������S��ʹ�C(j��)�����Ƅ��S�Ŀ��Q����Ҫָ�����S�� �Ƅӻ��_��?q��)�܉�������b�S�dz��C(j��)�����S�������S�����S�Ŀ��Q��ָʹ���������b�A�߷��D(zhu��n)�ͻ��D(zhu��n)���S������D(zhu��n)�_�����D(zhu��n)�_�ȡ���(sh��)�H���a(ch��n)�г��õ���6�P(gu��n)��(ji��)���I(y��)�C(j��)���ˣ�ԓ�����C(j��)��6���ɻ�ӵ��P(gu��n)��(ji��)���S���������c�D1�鳣Ҋ���I(y��)�C(j��)���˱��w�\(y��n)���S�Ķ��x��ֵ��ע����ǣ���ͬ�Ĺ��I(y��)�C(j��)���˱��w�\(y��n)���S�Ķ��xҲ��ͬ�����ڱ��Cĩ�ˈ�(zh��)�����_(d��)���������g����λ�õ��S�Q������S�����S�����ڌ�(sh��)�F(xi��n)ĩ�ˈ�(zh��)����������g�ˑB(t��i)���S���Q�����S����S���D2��YASKAWA���I(y��)�C(j��)���˸��\(y��n)���S���P(gu��n)ϵ��
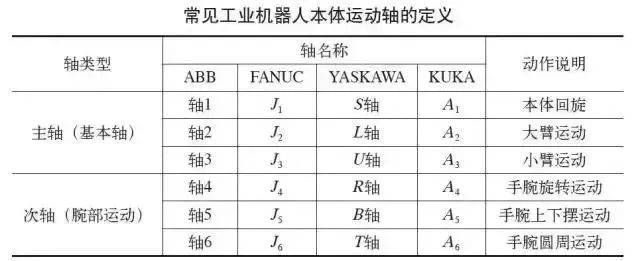
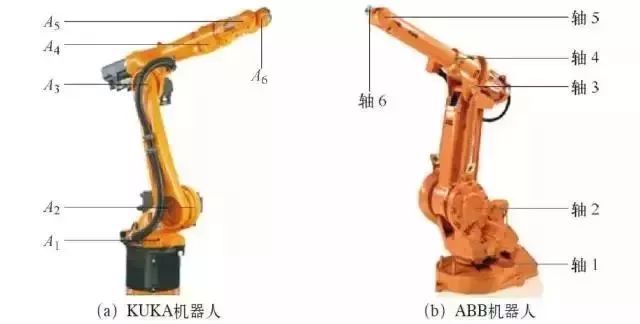
�D1 ���͙C(j��)���˸��\(y��n)���S
�D2 YASKAWA���I(y��)�C(j��)���˸��\(y��n)���S���P(gu��n)ϵ
1�����I(y��)�C(j��)�����S�Ķ��x
�ٹ��I(y��)�C(j��)�����S���Ԟ����D(zhu��n)�SҲ���Ԟ�ƽ���S���S���\(y��n)�з�ʽ�əC(j��)е�Y(ji��)��(g��u)�Q����
�ڹ��I(y��)�C(j��)�����S�֞�C(j��)���˱��w���\(y��n)���S���ⲿ�S��
�۹��I(y��)�C(j��)�����ⲿ�S�ַ֞黬�_��׃λ�C(j��)��
��������eָ�������I(y��)�C(j��)�����S��ָ�C(j��)���˱��w���\(y��n)���S��
2���C(j��)��������(bi��o)ϵ�ķN�
��ʾ��ģʽ�£��C(j��)�����S�\(y��n)�ӷ����c��(d��ng)ǰ�x�������(bi��o)ϵ���P(gu��n)��
���P(gu��n)��(ji��)����(bi��o)ϵ���C(j��)���˸��S�M(j��n)�ІΪ�(d��)�������Q���P(gu��n)��(ji��)����(bi��o)ϵ��
��ֱ������(bi��o)ϵ���C(j��)���˵Ŀ��������c(di��n)���O(sh��)����X��Y��Z �����\(y��n)�С�
�۹�������(bi��o)ϵ����������(bi��o)ϵλ�ڙC(j��)�������m�P�ĊA���ϣ����Ñ��Լ����x���A�ߵ���Ч�����x�鹤������(bi��o)ϵ��Z �S��
���Ñ�����(bi��o)ϵ���Ñ�����(bi��o)ϵλ�ڙC(j��)����ץȡ�Ĺ����ϣ����Ñ��Լ����x��
ʮ���C(j��)������(bi��o)ϵ�c��������(bi��o)ϵ�ą^(q��)�e
1�����|(zh��)��ͬ
�ٹ�������(bi��o)ϵ�����̕rʹ�õ�����(bi��o)ϵ��
�ڙC(j��)������(bi��o)ϵ���ԙC(j��)��ԭ�c(di��n)O������(bi��o)ϵԭ�c(di��n)����ѭ���ֵѿ���ֱ������(bi��o)ϵ��������X��Y��Z�S�M�ɵ�ֱ������(bi��o)ϵ��
2������������ͬ
�ٹ�������(bi��o)ϵ����������ͨ�^�C(j��)����������ք�ݔ�뵽��(sh��)��܇������(y��ng)�ĵ����a(b��)����Ԫ����(sh��)��ϵ�y(t��ng)����(j��)ԓλ���A(y��)�O(sh��)������(bi��o)ֵ��ͨ�^����(bi��o)׃�QӋ(j��)��_����������(bi��o)ϵԭ�c(di��n)��λ�ã�ʹ�C(j��)������(bi��o)ϵo��ԭ�c(di��n)ƫ�Ƶ����蹤������(bi��o)ϵ��ԭ�c(di��n)���@�Ӿͽ�����һ����O(sh��)��ԭ�c(di��n)�Ĺ�������(bi��o)ϵ��
�ڙC(j��)������(bi��o)ϵ����������
��1���ȴ_��Z�S��
��2���ٴ_��X�S����X�Sʼ�Kˮƽ����ƽ���ڹ����b�A�棩
��3�����_��Y�S�������ֵѿ���ֱ������(bi��o)ϵ�_����
ʮһ���Y(ji��)�Z
����(bi��o)ϵ�ķNܶ࣬���õ�����(bi��o)ϵ�У��ѿ���ֱ������(bi��o)ϵ��ƽ��O����(bi��o)ϵ����������(bi��o)ϵ����Q������(bi��o)ϵ������������(bi��o)ϵ(��Q������(bi��o)ϵ)�ȡ��ЌW(xu��)����W(xu��)�г��õ�����(bi��o)ϵ����ֱ������(bi��o)ϵ����Q����������(bi��o)ϵ��
�ďV�x���v�������һ�г������Dž����������ٵ�����(bi��o)ϵ���ڵģ�ͬһ�������ڲ�ͬ������(bi��o)ϵ�о͕��в�ͬ����������ʾ������(bi��o)ϵ���_(d��)��������(li��n)ϵ�ij������Ĕ�(sh��)����������(bi��o)�S�Ĕ�(sh��)��������ԓ������̎���g�ľS�ȡ�
�ɼ������׃����������ͬ����(bi��o)ϵ�С�
����Ԕ��(x��)��B�˹��I(y��)�C(j��)��������(bi��o)�S�����c��������(bi��o)ϵ�Ĵ_�������ڌ�ʹ�����������������ڹ��I(y��)�C(j��)����Ʒ�N���࣬ÿ�N���I(y��)�C(j��)���˵�����(bi��o)ϵҲ�ܶ࣬���������_����ʽ�mȻ�И�(bi��o)��(zh��n)�������е����a(ch��n)�S���ֲ�����(bi��o)��(zh��n)��(zh��)�У����и��Ľз����ڌ�(sh��)�H���a(ch��n)��(y��ng)�Õr���@�÷dz���y�韩���gӭ�a(b��)�����ԣ�

�j(lu��)����")

����")
�j(lu��)110")