
 在線客服
在線客服
 企業微信
企業微信


庫卡機器人SEMD 和 / 或 MEMD 包括在庫卡零點標定組件中。有多種零點標定組件選型。

需要注意幾點:
借助零點標定標記將軸移入預零點標定位置
在每次零點標定之前都必須將軸移至預零點標定置。移動各軸,使零點標定標記重疊。
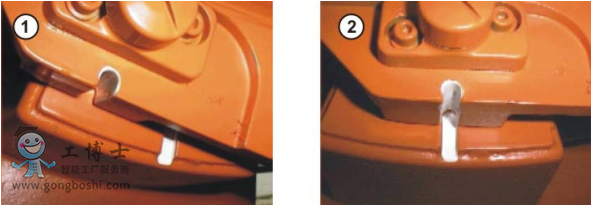
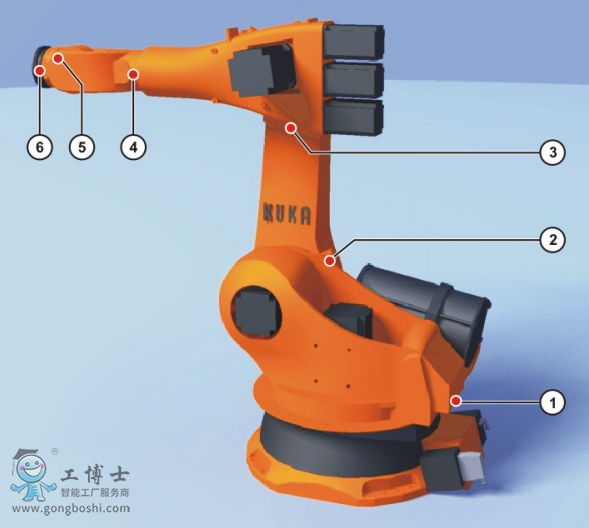
下圖顯示零點標定標記位于機器人上的位置。由于機器人的型號不同,位置會與插圖稍有差異。
在 A4 和 A6 進入預零點標定位置前,必須確保供能系統 (如果有的話)應處在正確位置,不得翻轉 360°。
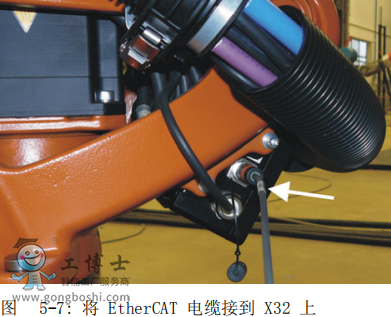
細電纜是測量電纜。它將 SEMD 或 MEMD 與零點標定盒相連接。粗電纜是 EtherCAT 電纜。它將零點標定盒與機器人上的 X32 連接起來。
需要注意幾點:
讓測量電纜插在零點標定盒上,并且要盡可能少地拔下。傳感器插頭 M8 的可插拔性是有限的。經常插拔可能會損壞插頭。
下列情況針對測量導線沒有安裝牢固的測頭:始終將設備不帶測量導線擰到測量筒上。然后方可將導線接到設備上。否則導線會被損壞。同樣在拆除設備時也始終先拆下設備的測量導線。然后才將設備從測量筒上拆下。
在零點標定之后,將 EtherCAT 電纜從接口 X32 上取下。否則會出現干擾信號或導致損壞。
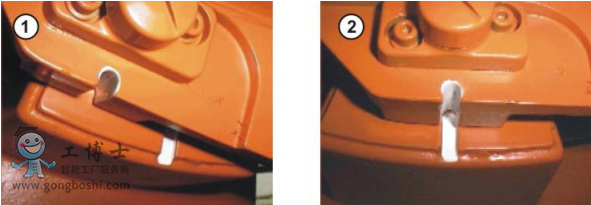
借助零點標定標記將軸移入預零點標定位置
在每次零點標定之前都必須將軸移至預零點標定置。移動各軸,使零點標定標記重疊。
下圖顯示零點標定標記位于機器人上的位置。由于機器人的型號不同,位置會與插圖稍有差異。
前提條件
運行模式 “ 運行鍵 ” 已激活。
運行方式 T1
在 A4 和 A6 進入預零點標定位置前,必須確保供能系統 (如果有的話)應處在正確位置,不得翻轉 360°。
操作步驟
1. 選擇軸作為運動鍵的坐標系。
2. 按住確認開關。在移動鍵旁邊將顯示軸 A1 至 A6。
3. 按下正或負運動鍵,以使軸朝正方向或反方向運動。
4. 從 A1 開始逐一移動各個軸,使零點標定標記相互重疊。(在借助標記線對軸進行零點標定的機器人上的 A6 除外。)
借助測頭將軸移入預零點標定位置
在每次零點標定之前都必須將軸移至預零點標定位置。通常情況下,借助零點標定標記進行此操作。
在有些情況下無法進行,例如由于這些標記因臟污而無法識別。也可借助測頭對齊這些軸,而不使用零點標定標記。smartHMI 上的一個 LED 指示燈顯示何時達到預零點標定位置。
前提條件
運行模式 “ 運行鍵 ” 已激活。
運行方式 T1
沒有選定任何程序。
用戶大致了解軸的預零點標定位置。
操作步驟
1. 將機器人手動移動到軸與其預零點標定位置有一小段距離的某一位置上。然后,它們必須可沿負向運行到預零點標定位置上。
2. 在主菜單中選擇 投入運行 > 調整 > EMD > 帶負載校正。現在選擇首次調整或偏量學習或帶偏量,取決于哪個步驟需要進行軸對齊。
3. 按照各個零點標定過程的說明繼續操作,直到測頭裝在 A1 上并且通過零點標定盒與 X32 相連接。
4. smartHMI 上顯示 在零點標定區域內的 EMD LED 指示燈。現在必須顯示為紅色。注意觀察 LED 指示燈。
5. 沿負向手動移動機器人。一旦 LED 燈從紅色轉換為綠色,機器人即刻停止。A1 現在位于預零點標定位置。
7. 將剩余的軸按照升序以相同的方式移到預零點標點位置上。(借助標記線對軸零點標定的機器人上的 A6 除外。)
8. 關閉含零點標定 LED 燈的窗口。
9. 將 EtherCAT 電纜從接口 X32 和零點標定盒上取下。
6. 如零點標定流程所述從測量筒上取下測頭,并將防護蓋重新裝好。
7. 將剩余的軸按照升序以相同的方式移到預零點標點位置上。(借助標記線對軸零點標定的機器人上的 A6 除外。)
8. 關閉含零點標定 LED 燈的窗口。
9. 將 EtherCAT 電纜從接口 X32 和零點標定盒上取下。
零點標定 LED 指示燈
在大多數零點標定過程中,smartHMI 顯示一個含有軸的列表。兩個 LED 指示燈位于列表右側。
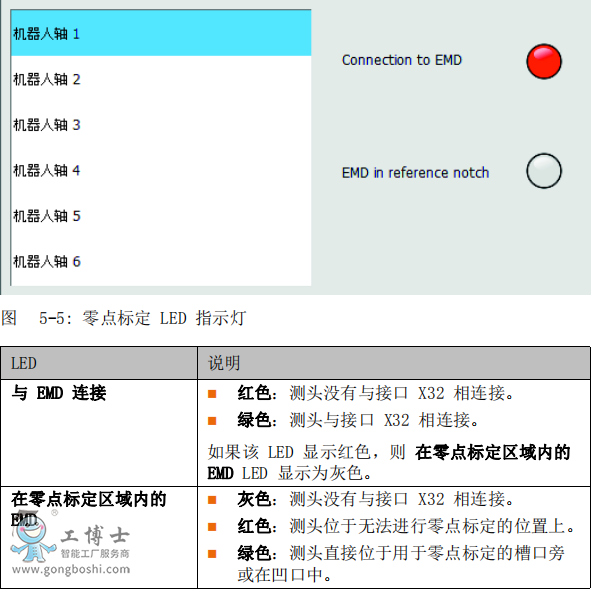
可使用 在零點標定區域內的 EMD 的 LED 指示燈,以借助測頭將軸移到預零點標定位置上。沿負向手動移動時 LED 指示燈從紅色轉換為綠色的時刻即達到了預零點標定位置。
使用 SEMD 進行零點標定
在使用 SEMD 零點標定時,機器人控制系統自動將機器人移動至零點標定位置。先不帶負載進行零點標定,然后帶負載進行零點標定。可以保存不同負載的多次零點標定。
1、首次調整——進行首次零點標定時不加負載。
2、偏量學習——“ 偏量學習 ” 即帶負載進行。保存與首次零點標定之間的
差值。
3、必要時:檢查有偏差的負載零點標定——“ 檢查有偏差的負載零點標定 ” 以已針對其進行了偏差學習的負載來執行。
應用范圍:
首次零點標定的檢查
如果首次調整丟失 (如在更換電機或碰撞后),則還原首次調整。由于學習過的偏差在零點標定丟失后仍然存在,所以機器人可以計算出首次零點標定。
進行首次零點標定 (用 SEMD)
機器人沒有負載。也就是說,沒有安裝工具或工件和附加負載。
所有軸都處于預調位置。
沒有選擇程序。
運行方式 T1
操作步驟
1. 在主菜單中選擇投入運行 > 調整 > EMD > 帶負載校正 > 首次調整。一個窗口自動打開。所有待零點標定軸都顯示出來。編號*小的軸已被選定。
2. 取下接口 X32 上的蓋子。

3. 將 EtherCAT 電纜連接到 X32 和零點標定盒上。
4. 從窗口中選定的軸上取下測量筒的防護蓋。(翻轉過來的 SEMD 可用作螺絲刀。)

5. 將 SEMD 擰到測量筒上。


8. 點擊校正。
9. 按下確認開關和啟動鍵。如果 SEMD 已經通過了測量切口,則零點標定位置將被計算。機器人自動停止運行。數值被保存。該軸在窗口中消失。
12. 關閉窗口。
13. 將 EtherCAT 電纜從接口 X32 和零點標定盒上取下。
了解更多技術資料,請點擊:工博士
3. 將 EtherCAT 電纜連接到 X32 和零點標定盒上。
4. 從窗口中選定的軸上取下測量筒的防護蓋。(翻轉過來的 SEMD 可用作螺絲刀。)
5. 將 SEMD 擰到測量筒上。
7. 如果未進行連接,則將測量電纜連接到零點標定盒上。
8. 點擊校正。
9. 按下確認開關和啟動鍵。如果 SEMD 已經通過了測量切口,則零點標定位置將被計算。機器人自動停止運行。數值被保存。該軸在窗口中消失。
10. 將測量導線從 SEMD 上取下。然后從測量筒上取下 SEMD,并將防護蓋重新裝好。
11. 對所有待零點標定的軸重復步驟 4 至 10。
12. 關閉窗口。
13. 將 EtherCAT 電纜從接口 X32 和零點標定盒上取下。
了解更多技術資料,請點擊:工博士




