
 在線客服
在線客服
 企業微信
企業微信


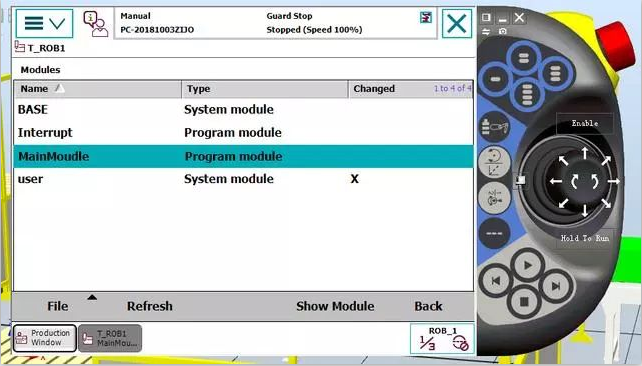
應用程序(Program);系統模塊(Systemmodules)。
機器人程序儲存器中,只允許存在一個主程序;所有例行程序與數據無論存在于哪個模塊,全部被系統共享;所有例行程序與數據除特殊定義外,名稱必須是唯一的。
1、應用程序(Program)的組成
a、主模塊(Mainmodule) 主程序(Mainroutine) 程序數據(Programdata) 例行程序(Routines)
b、程序模塊(Programmodules) 程序數據(Programdata) 例行程序(Routines)
2、系統模塊(Systemmodules)的組成
a、系統數據(Systemdata)
b、例行程序(Routines)
所有ABB機器人都自帶兩個系統模塊,USER模塊與BASE模塊,根據機器人應用不同,有些機器人會配備相應應用的系統模塊。建議不要對任何自動生成的系統模塊進行修改。
二、編程窗口
1、菜單鍵File
a、 Open:打開一個現有文件。(程序.prg或模塊.mod)
b、 New:新建一個程序。
c 、Saveprogram :存儲更改后的現有程序。
d 、Saveprogramas:存儲一個新程序。
e 、Print: 打印程序,現已經不使用。
f、 Preferences:定義用戶化指令集。
g、 Checkprogram :檢驗程序,光標會提示錯誤。
h、Close:在程序儲存器中關閉程序。
i、 Savemodule :存儲更改后的現有模塊。(只在Module窗口中存在)
j、 Savemoduleas : 存儲一個新模塊。(只在Module窗口中存在)
2、菜單鍵Edit
a、 Cut:剪切,可能會丟失指令或數據。
b、Copy :復制。
c、Paste :粘貼,將剪切或復制的指令或數據粘貼到相應位置。
d、 GotoTop:將光標移至頂端。
e、 GotoBottom :將光標移至底端。
f、Mark :定義一塊,涂黑部分。
g、 ChangeSelected :修改指令中數據,可直接將光標移至相應位置按回車鍵。
h、Showvalue: 輸入數據,可直接將光標移至相應數據按回車鍵。
i、 Modpos :修改機器人位置,功能鍵上有。
j、 Search:尋找指令,程序復雜時很有用。
k、功能鍵:Copy、Paste、Modpos在菜單鍵Edit中可以找到。
三、指令
1、基本運動指令
MoveL:線性運動 (Linear)
MoveJ:關節軸運動 (Joint)
MoveC :圓周運動 (Circular)
p1:目標位置。(robtarget)
v100:運行速度mm/s。(speeddata)
z10:轉彎區尺寸mm。(zonedata)
tool1:工具中心點TCP。(tooldata)
a、速度選擇:mm/s
· 將光標移至速度數據處,按回車鍵,進入選擇窗口,選擇所需速度。
· 機器人運行速度屬于數據類型speeddata。
· 常用運行速度在Base模塊中已經定義。
· 特殊速度可自行定義。
· max速度為v5000,Base模塊中定義最大速度為v7000,最大速度機器人未必能達到。
b、轉彎區尺寸選擇:mm
· 將光標移至轉彎區尺寸數據處,按回車鍵,進入選擇窗口,選擇所需轉彎區尺寸。
· 機器人轉彎區尺寸屬于數據類型zonedata。
· 常用轉彎區尺寸在Base模塊中已經定義。
· 特殊轉彎區尺寸可自行定義。
· fine指機器人TCP達到目標點,并在目標點速度降為零,連續運行時,機器人動作有停頓。
· zone指機器人TCP不達到目標點,連續運行時,機器人動作圓滑、流暢。
· Base模塊中已經定義的轉彎區尺寸最小為z1,最大為z200。
· 盡量使用較大的轉彎區尺寸。
c、參變量:
光標指在當前指令時,按功能鍵OptArg,可選擇參變量。
· [Conc](switch) 協作運動。機器人未移動至目標點,已經開始執行下一個指令。
· [ToPoint](robtarget) 在采用新指令時,目標點自動生成*。·[V](num) 定義速度mm/s。
· [T](num) 定義時間s。通過時間決定速度。
· [Z](num) 定義轉彎區尺寸mm。
· [Wobj](wobjdata) 采用工件系座標系統。
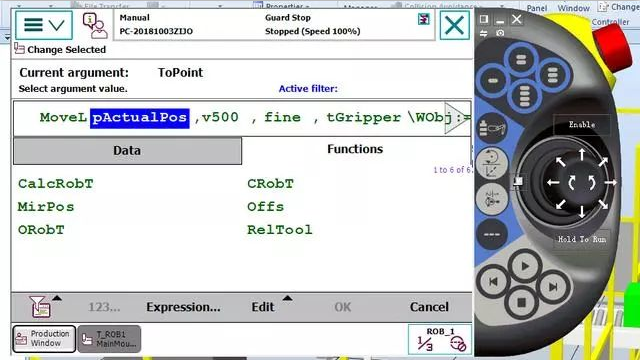
d、函數Offs:
MoveLp1,v100,…
MoveLp2v100,…
MoveLp3,v100,…
MoveLp4,v100,…
MoveLp1,v100,…
· 為了精確確定p1、p2、p3、p4點,可以使用函數Offs。
· Offs(p1,x,y,z)代表一個離p1點X軸偏差量為x,Y軸偏差量為y,Z軸量為z的點。
· 將光標移至目標點,按回車鍵,進入目標點選擇窗口,在功能鍵上選擇Func,采用切換選擇所用函數Offs。
MoveLp1,v100,…
MoveLOffs(p1,100,0,0),v100,…
MoveLOffs(p1,100,-50,0),v100,…
MoveLOffs(p1,0,-50,0),,v100,…
MoveLp1,v100,…
2、輸入輸出群指令
· do指機器人輸出信號。
· di指輸入機器人信號。
· 輸入輸出信號必須在系統參數中定義。
· 輸入輸出信號有兩種狀態,1(High)為接通,0(Low)為斷開。
a、輸出信號指令
· 輸出輸出信號指令:set dol do1:輸出信號名。(signaldo)將一個輸出信號賦值為1。
· 復位輸出信號指令:Reset do1 do1:輸出信號名。(signaldo)將一個輸出信號賦值為0。
· 輸出脈沖信號指令:PulseDOPLength:=0.2,do1 do1:輸出信號名。(signaldo)輸出一個脈沖信號,脈沖長度為0.2s。
參變量:[PLength](num) 脈沖長度,0.1s-32s。
b、輸入信號指令:
WaitDI di1, 1
di1:輸入信號名。(signaldi)
3、參變量
· [MaxTime](num)等待輸入信號最長時間s。
· [TimeFlag](bool)邏輯量,TRUE或FALSE。
如果只選用參變量[MaxTime],等待超過最長時間后,機器人停止運行,并顯示相應出錯信息。如果同時選用參變量[MaxTime]與參變量[TimeFlag],等待超過最長時間后,無論是滿足等待的狀態,機器人將自動執行下一句指令。如果在最長等待時間內得到相應信號,將邏輯量置為FALSE,如果超過最長等待時間,邏輯量置為TRUE。
4、通信指令(人機對話)
a、清屏指令:TPErase
b、寫屏指令:PWrite String tring:顯示的字符串。(string)在示教器顯示屏上顯示字符串數據,也可以用"……"形式直接定義字符串,每一個寫屏指令最多顯示80個字符。
c、功能鍵讀取指令:TPReadFK, Answer , Text , FK1 , FK2. FK3, FK4 , FK5 Answer:賦值數字變量。(num) Text:顯示屏顯示的字符串。(string) FK1:功能鍵1顯示的字符串。(string) FK2:功能鍵2顯示的字符串。(string) FK3:功能鍵3顯示的字符串。(string) FK4:功能鍵4顯示的字符串。(string) FK5:功能鍵5顯示的字符串。(string)
在示教器顯示屏上顯示字符串數據,在功能鍵上顯示相應字符串,選擇按相應的功能鍵,機器人自動給數字變量賦于相應數值1-5。
5、程序運行停止指令
a、停止指令Stop:機器人停止運行,軟停止指令(Soft Stop),直接在下一句指令啟動機器人。
b、停止指令Exit:機器人停止運行,并且復位整個運行程序,將程序運行指針移至主程序第一行。機器人程序必須從頭運行。
c、停止指令Break:機器人立刻停止運行,有沖擊,直接在下一句指令啟動機器人。
6、計時指令
a、時鐘復位指令:ClKReset Clock Clock:機器人時鐘名稱。(clock)
b、時鐘啟動指令:ClKStart Clock Clock:機器人時鐘名稱。(clock)
c、時鐘停止指令:ClKStop Clock Clock:機器人時鐘名稱。(clock)
7、速度控制指令:VelSet , Override, Max
Override:機器人運行速率%。(num)
Max:機器人最大速度mm/s。(num)
每個機器人運動指令均有一個運行速度,在執行速度控制指令后,機器人實際運行速度為運動指令規定運行速度乘以機器人運行速率(Override),并且不超過機器人最大運行速度(Max)。
8、等待指令
WaitTime , Time
Time:機器人等待時間s。(num)
等待指令只是讓機器人程序運行停頓片刻。
9、賦值指令
Data:=Value
Data:被賦值的數據。(All)
Value:數據被賦予的值。
舉例:
ABB:=FALSE;(bool)
ABB:=reg1+reg3;(num)
ABB:="WELCOME";(string)
Home:=p1;(robotarget)
tool1.tframe.trans.x:=tool1.tframe.trans.x+20;(tooldata)
10、負載定義指令
GripLoad Load
Load:機器人當前負載,數據類型為Loaddata。
免責聲明:本文系網絡轉載




